Texture Mapping 纹理映射
纹理映射方法
纹理映射是将三维物体每个点的颜色信息存储在一张2d的Texture里,根据映射关系计算出漫反射系数,经过计算纹理就被贴在了物体上。
计算方法:纹理坐标用(u,v)表示,纹理空间之内任意一个二维坐标都在[0,1]之内。对每个光栅化的屏幕坐标算出uv坐标,再利用查询texture对应的颜色,作为漫反射系数$K_d$。
纹理尺寸引发的问题
纹理过小
把小尺寸的纹理贴在大尺寸的物体上,会有很多像素共享一个颜色,造成失真的效果。
双线性插值(Bilinear Interpolation)
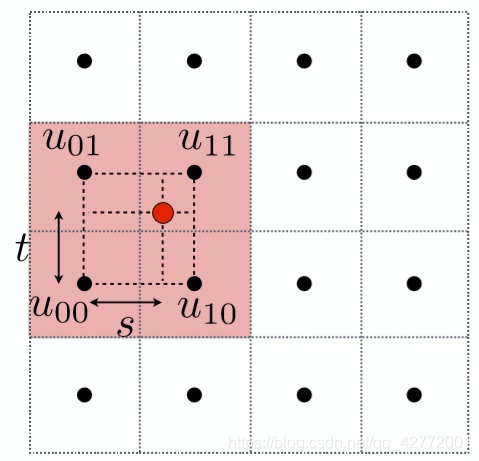
对于一个点,取出离它最近的4个纹理坐标,分别算出在水平及竖直方向偏移的比率$s$、$t$,先利用$s$进行一次插值:
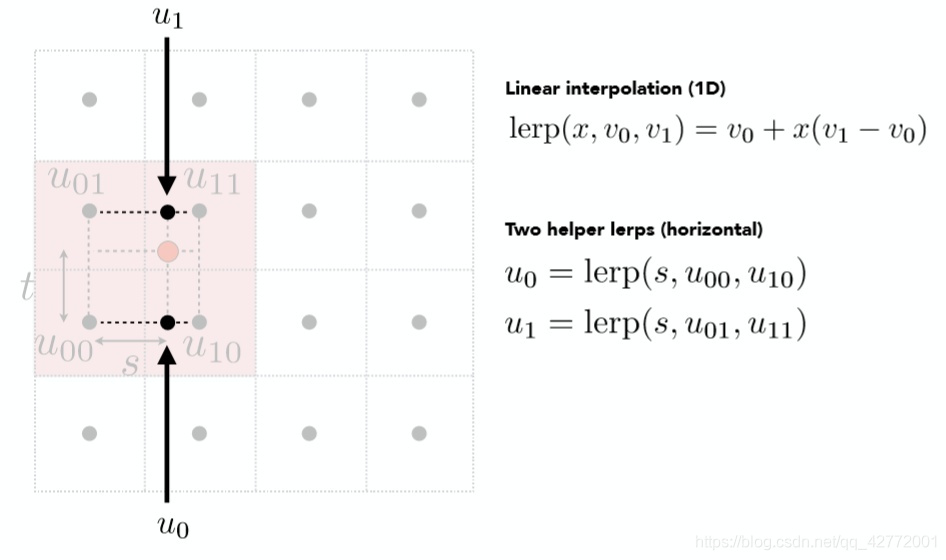
接着再用$t$再进行一次插值:
\[f(x,y)=lerp(t,u_0,u_1)\]纹理过大
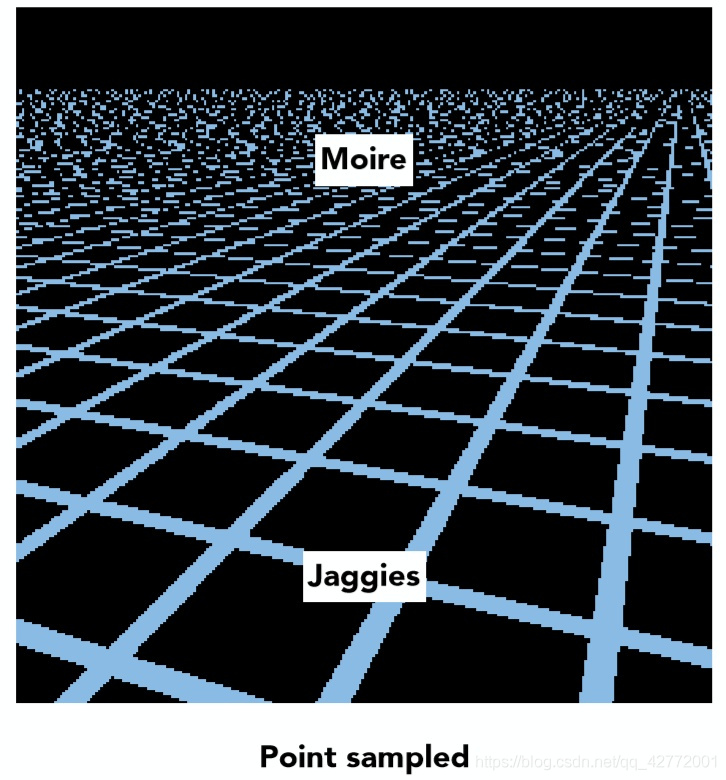
上图所示的摩尔纹现象,是因为根据近大远小原理,远处的一个像素点可能对应了纹理中的一片范围,即纹理过大。本质上是采样频率过低,这时候可以采用Supersampling,把一个像素点分为更多采样点来取得纹理,但这样计算量过大,不适合实际应用。
那么,可以将纹理区域求均值,即下面的Mipmap技术。
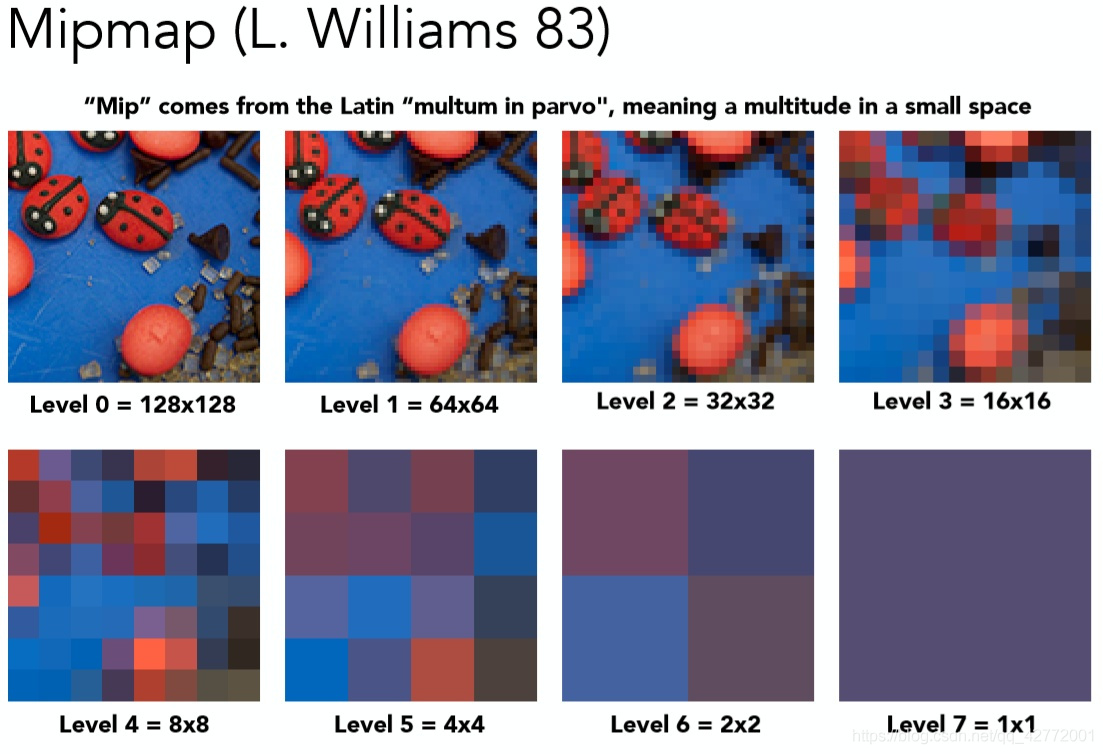
Mipmap
对于一张图片,远小近大的程度不同,可能会对应不同数量的纹理点,这时候需要分成多个level来处理:
根据屏幕像素的footprint大小选定不同level的texture,相当于在原始texture上进行区域查询,我们利用相邻像素点来估算footprint大小再确定level:
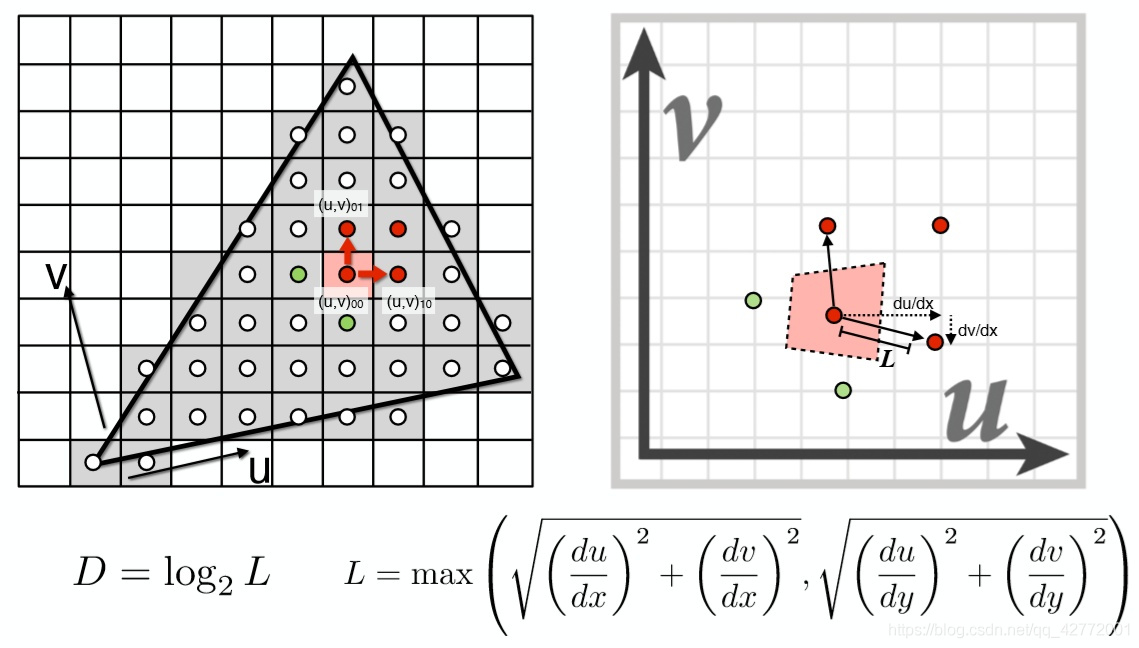
在屏幕空间中取当前像素点的右方和上方的两个相邻像素点,分别查询这3个点对应纹理坐标,计算出纹理空间中当前像素点与它们的距离,二者取最大值,计算公式如图所示,距离的log2值就是level D。
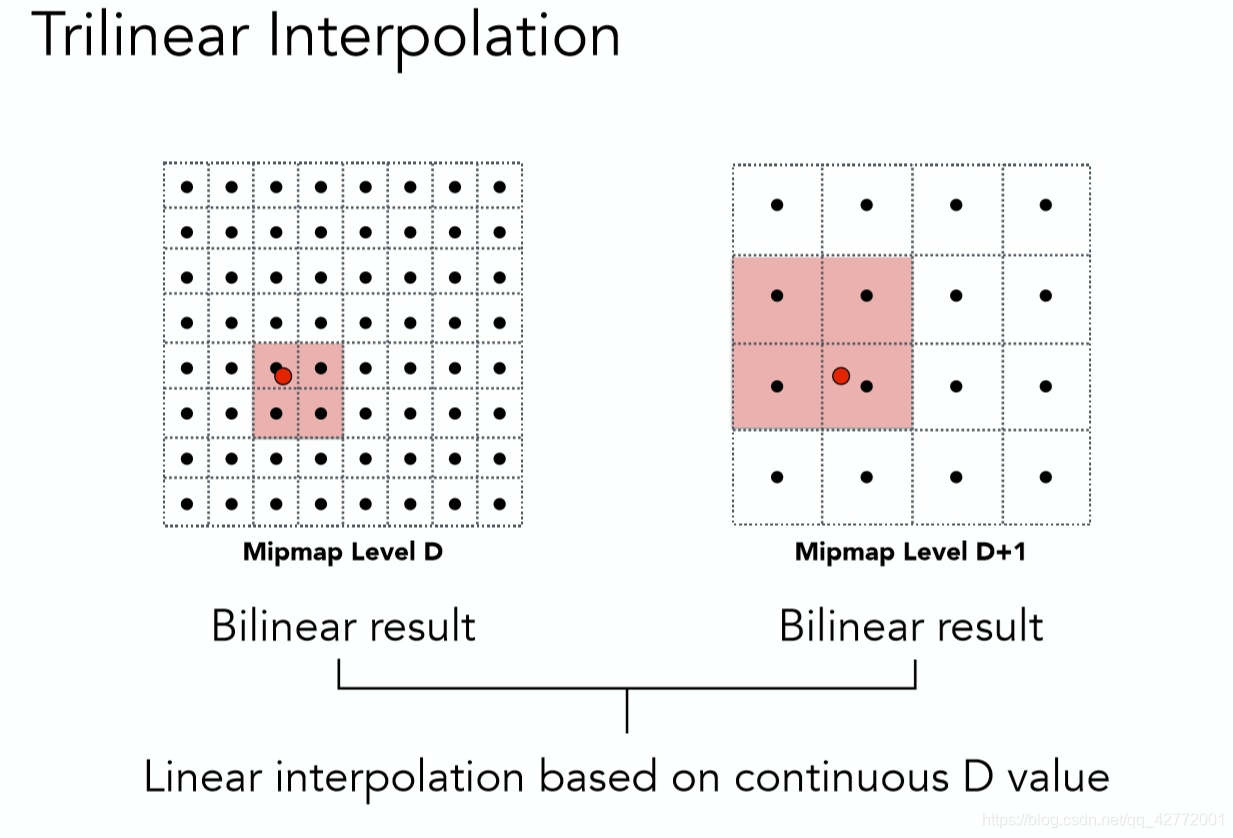
此时计算出的D是一个连续值,可以采用四舍五入或者三线性插值的方法。
各向异性过滤Mipmap
上面的Mipmap方法默认每个区域都是正方形,但实际上对应的形状并不是正方形,如下图:
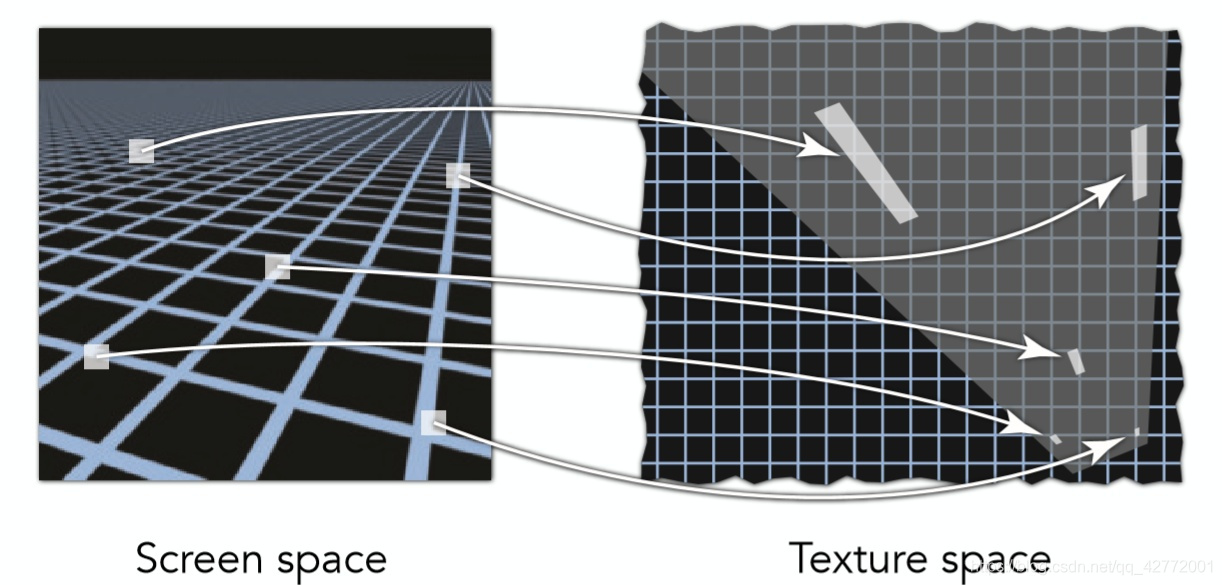
所以需要从不同的方向算level D0、D1,再选择一个适合的区域。
纹理映射应用
法线贴图 (Normal Maps)
前面内容中提到,Texture中可以存储颜色信息,那么它也可以存储法线向量,利用(u,v)坐标查询法线而不是使用物体本来的法线,可以达到不同的效果,称为法线贴图。
法线向量存储需要利用切线空间,存储切线空间下的法线向量,相比直接存储object space的坐标,能避免因为人物变形而导致法线错误。
参考:【D3D11游戏编程】学习笔记二十四:切线空间(Tangent Space)
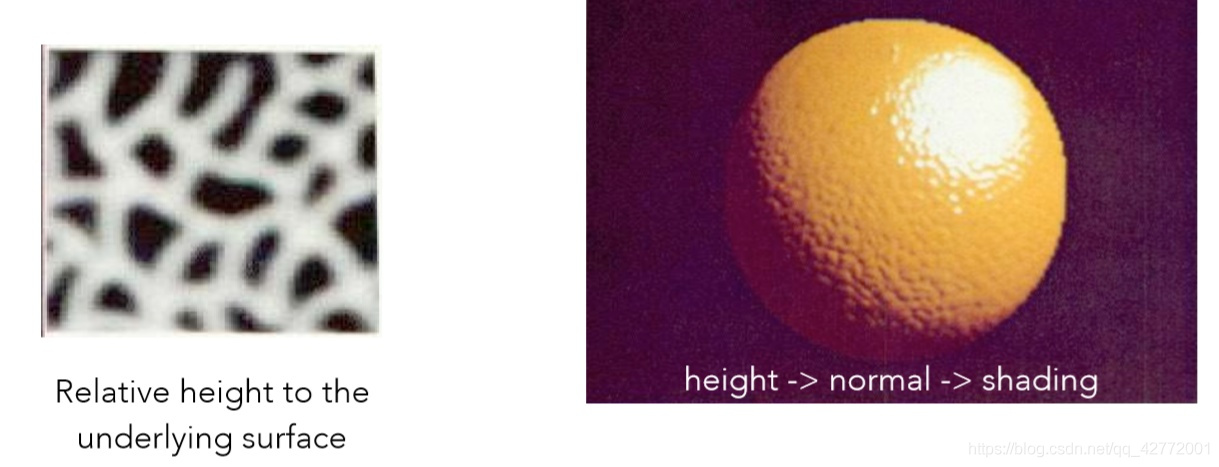
凹凸贴图 (Bump Maps)
法线贴图直接存储法线信息,而凹凸贴图存储的是该点的相对高度(可为负值),可以体现物体表面的凹凸情况,利用高度信息计算出该点法线向量,即比法线贴图多了一步计算的过程。
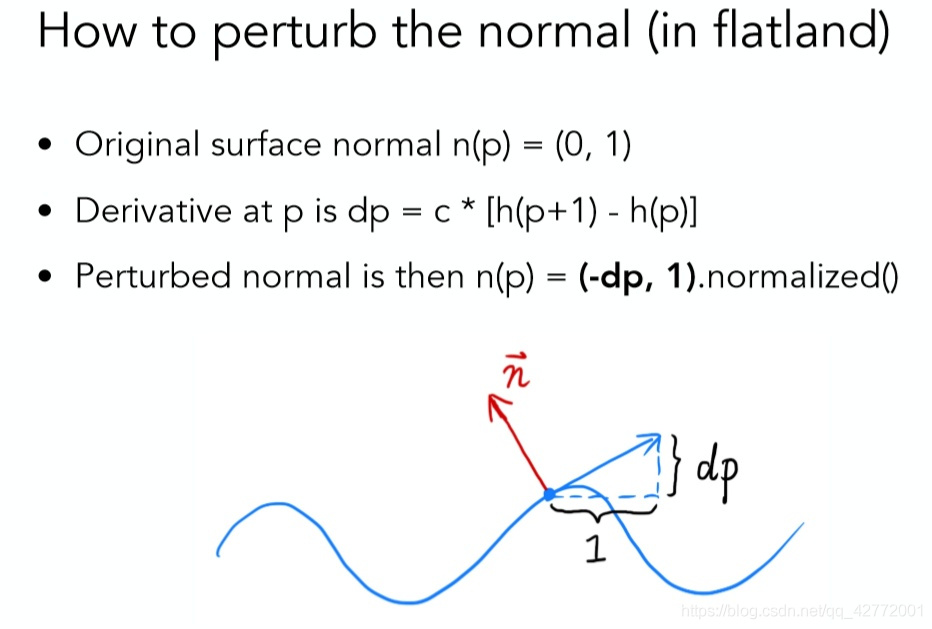
通过高度计算发现的方法如下,从二维:
扩展到三维的情况:
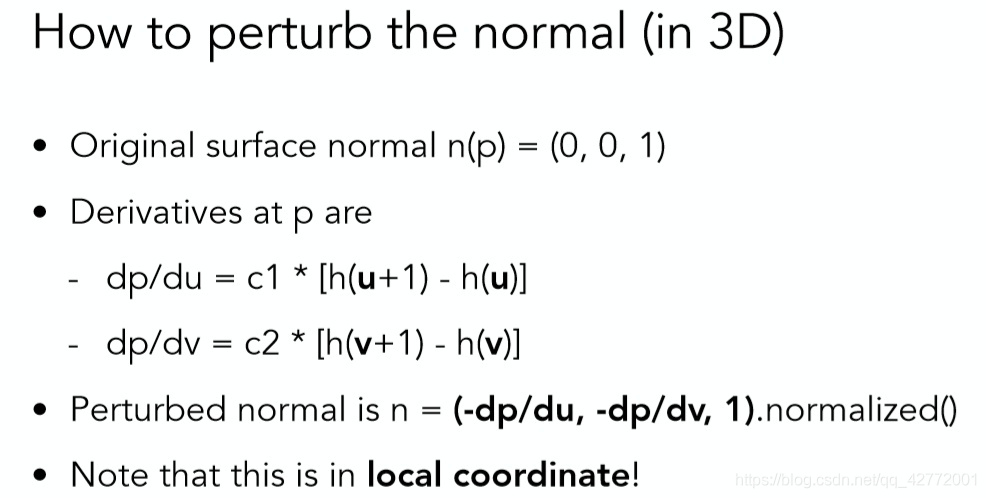
所有计算出的法线都是局部坐标,即切线空间下,因此还需要左乘[t b n]矩阵转到相机坐标系。
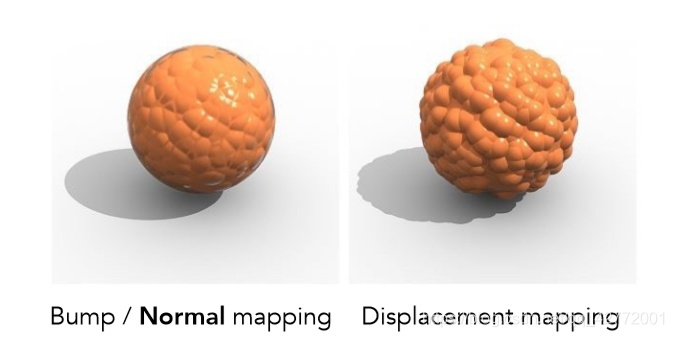
移位贴图 (Displacement Maps)
移位贴图与凹凸贴图类似,凹凸贴图是逻辑上的高度改变,而移位贴图是物理上的高度改变,下图物体阴影的边缘可以发现这点:
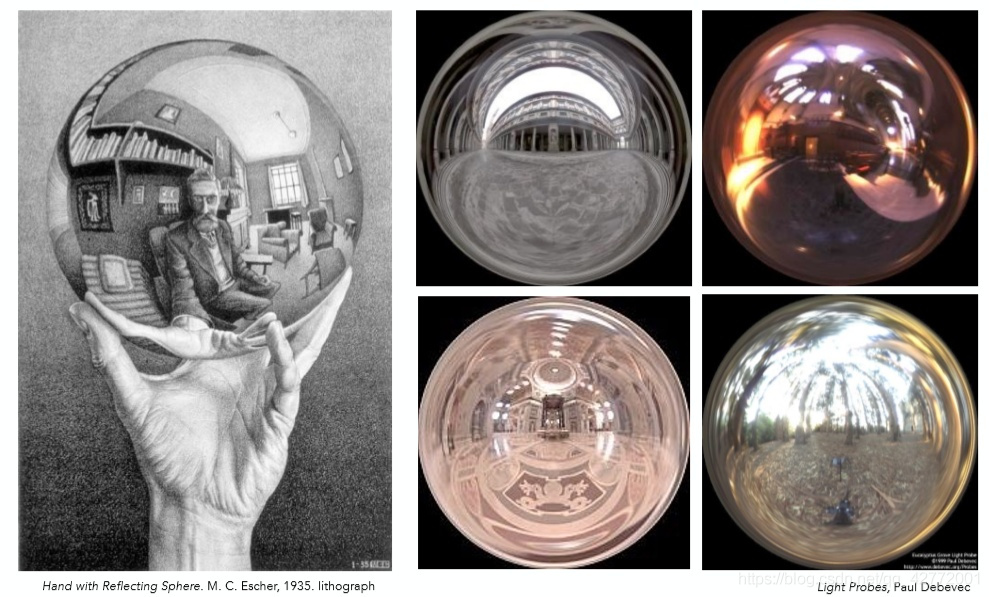
环境光映射 (Environment Maps)
将环境光存储在贴图中,当光照离物体的距离很远,物体上的各个点光照方向几乎没有区别,此时唯一变量是人眼观察方向,因此各个方向的光源就可以用一个球体进行存储,即任意一个3D方向都标志着一个texel:
对于Blinn-Phong模型,方法是增加一项反射,利用观察方向相对法线的反射方向查询环境映射的颜色值:

光线追踪中,光线未能撞击物体的时候,利用光线方向求得展开之后贴图上的(u,v)坐标,再查询颜色返回:
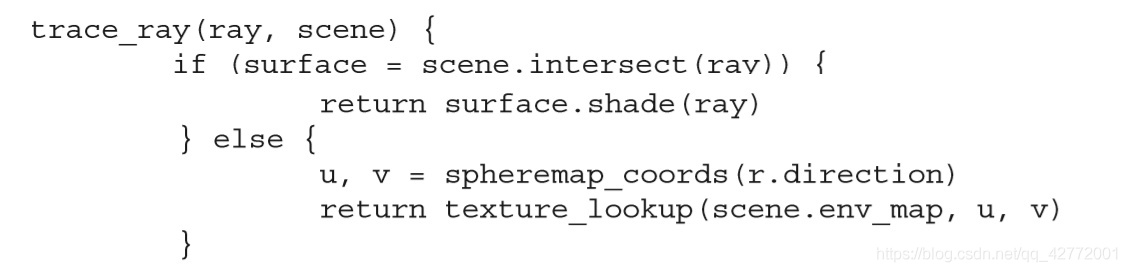

上图可以观察到用球体来存储环境光的缺点,上方和下方有较为严重的扭曲,因此可以用Cube Map,也就是天空盒存储:
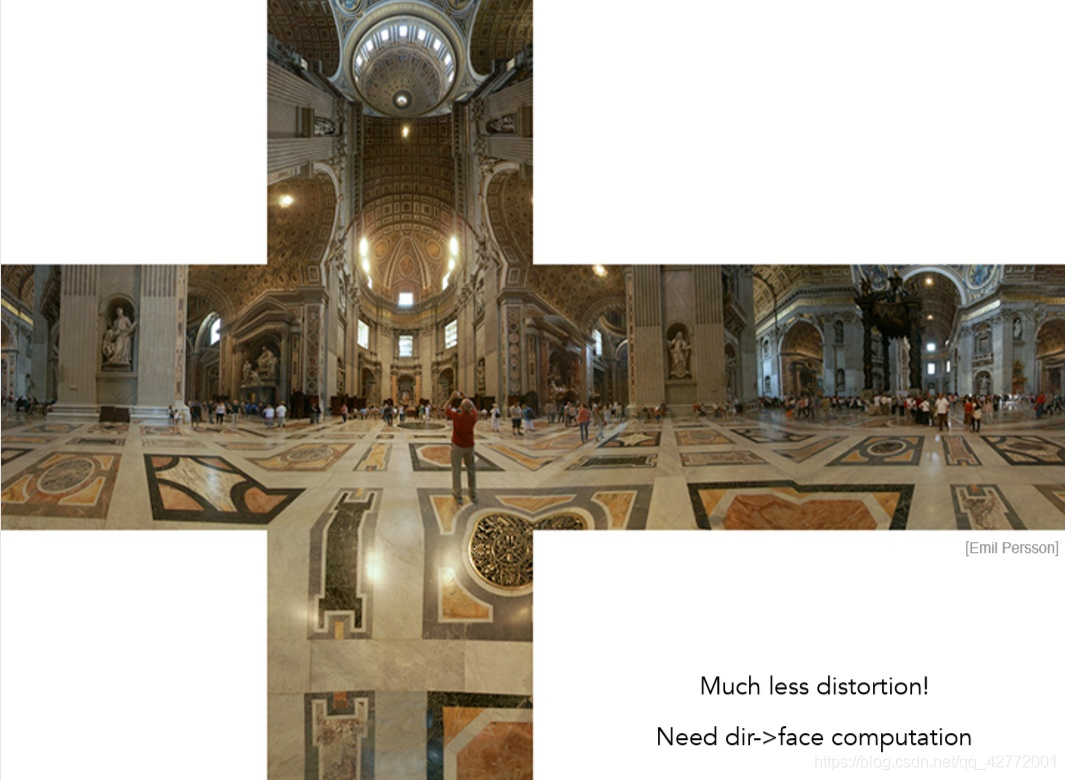
一个天空盒用6幅Texture,减轻扭曲现象,但需要多一步从方向到面上的计算:
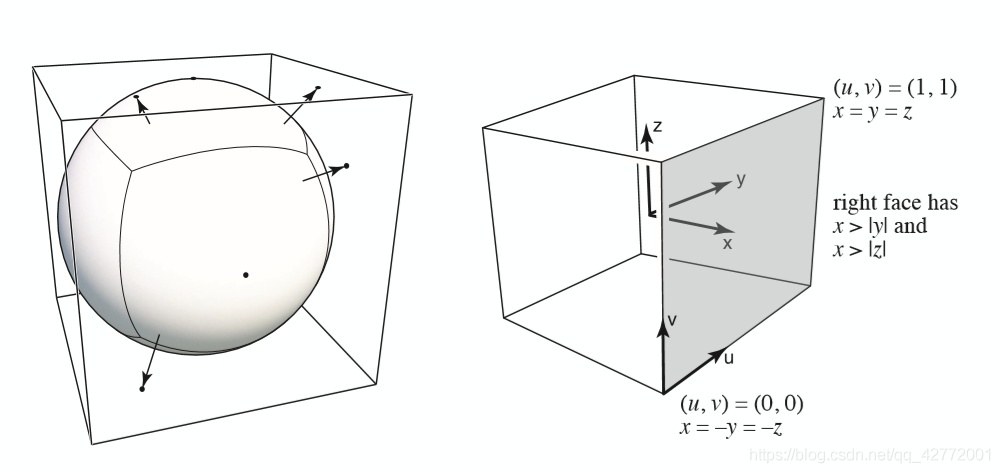
利用方向计算出与对应平面的交点坐标,剔除平面所对应的一维,剩下两维坐标标准化后即为(u,v)坐标。
阴影贴图 (Shadow Maps)
物体没有被光照射到的地方会产生阴影,此时需要阴影贴图来模拟这种现象。
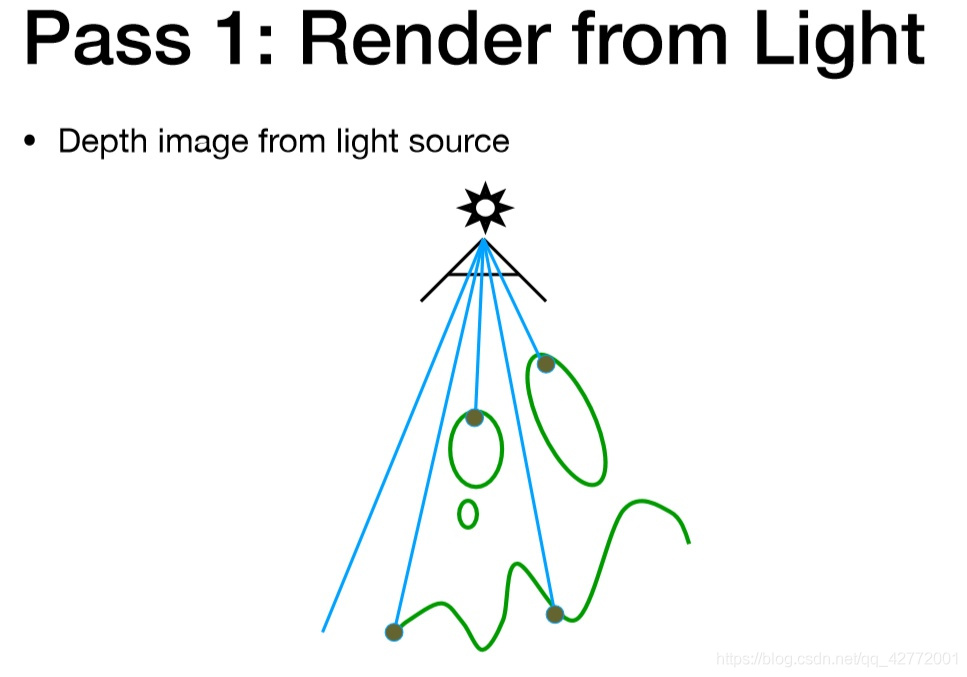
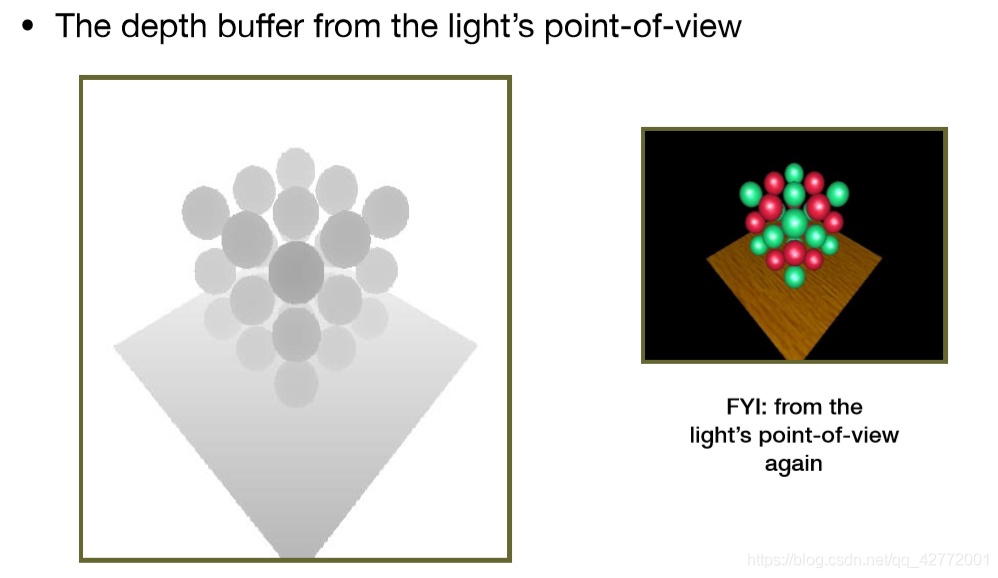
第一步,把光源当做一个摄像机,渲染整个场景一遍,得到从光源视角的深度Buffer,记为$d_{map}$。
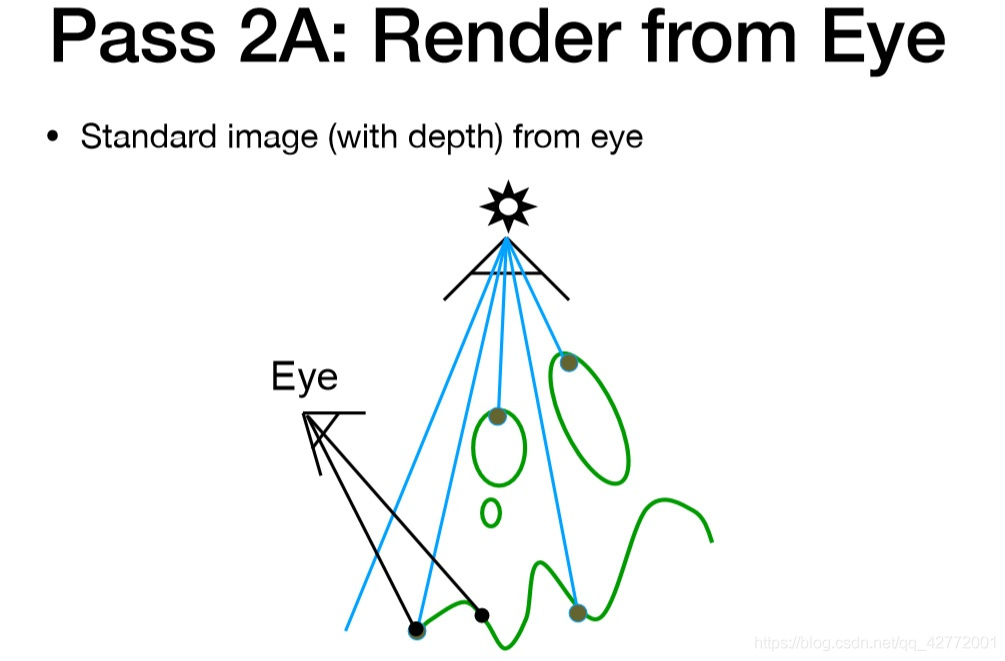
第二步,从真正的人眼观察角度(摄像机位置)去渲染场景。
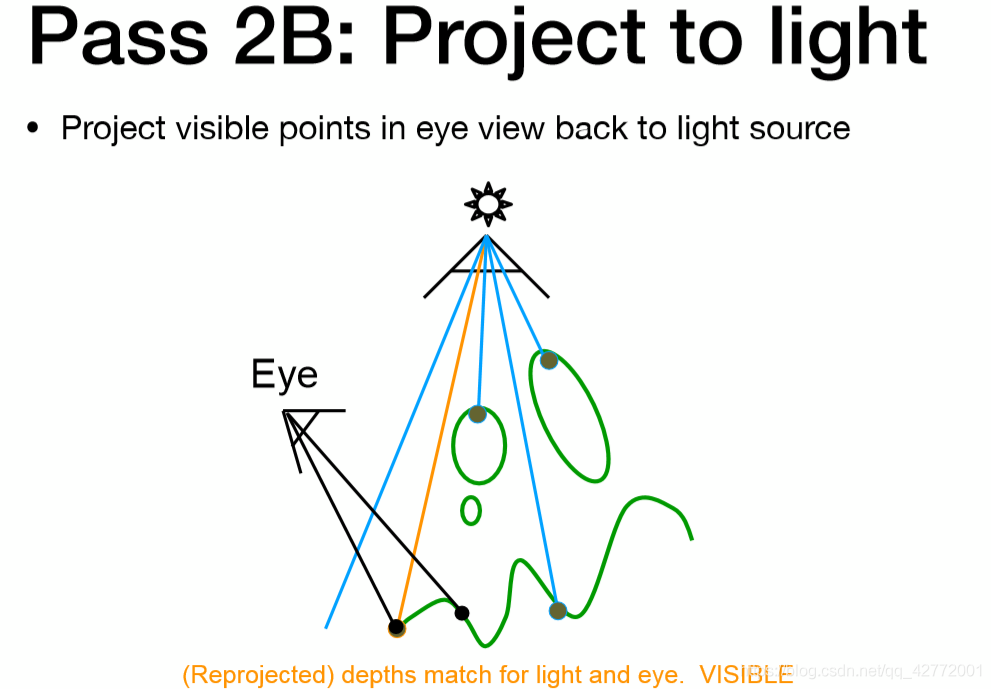
将观察角度所有可见点,利用光源视角下的投影矩阵重新投影回光源,得到光源视角下的屏幕坐标,找到该屏幕坐标在$d_{map}$上的深度值,如果该点在$d_{map}$的深度值与投影回光源的点的实际深度值相等,说明此点被光源照射,即不在阴影中,如上面黄色线的情况。
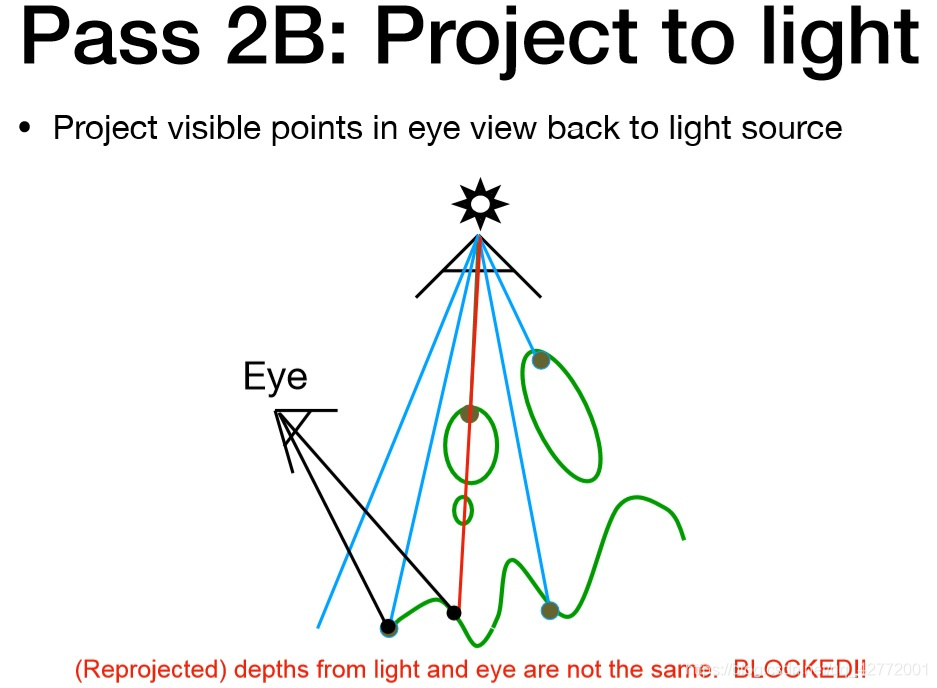
如果在$d_{map}$上的深度值小于投影回去的实际深度值,则该点不被光源看见,即前方有物体遮挡,因此判定它在阴影中,如上面红色线的情况。
通过筛选,在阴影中的点不进行Blinn-Phong模型中镜面反射与漫反射的计算,最终效果如下:
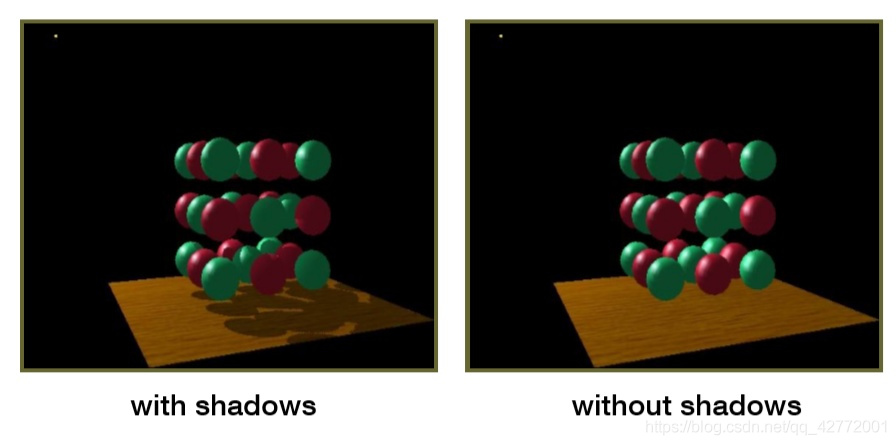
对应可视化的阴影贴图如下,距离光源越近颜色越黑(深度值小):
阴影贴图的几个notes:
-
深度值是浮点数,不会严格判断相等,会使用tolerance
-
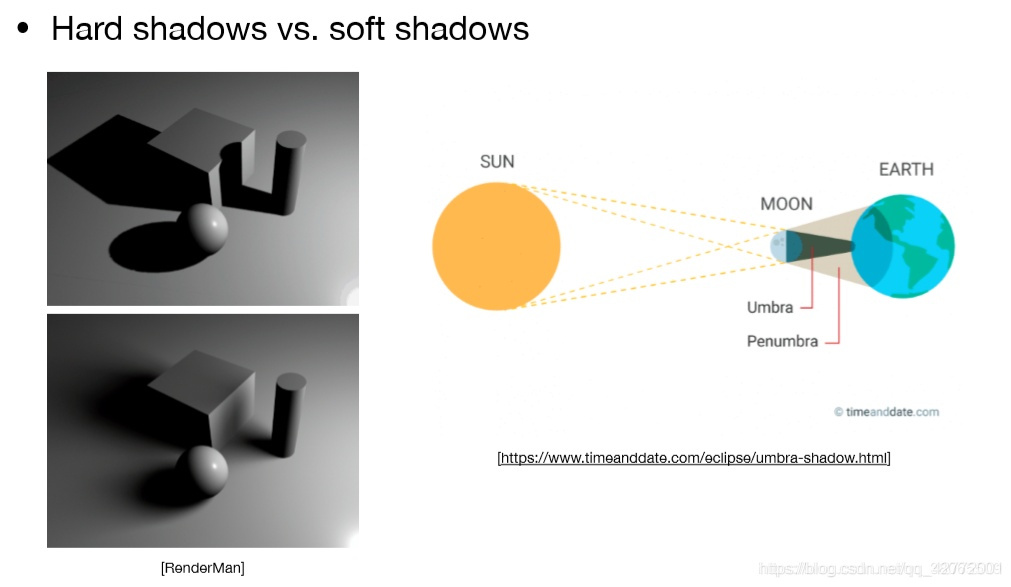
上面的计算结果属于硬阴影,只适用于点光源
软硬阴影示意: